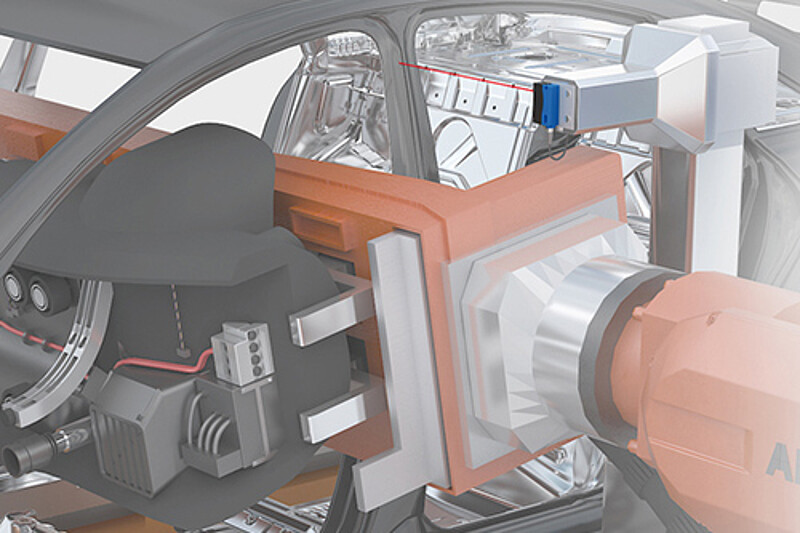
Mesure de distance pour le positionnement des robots
C’est la seule façon d’assurer une installation en douceur via le robot, qui doit guider l’habitacle entre les montants A et B dans le véhicule. La position correcte sur laquelle la carrosserie doit s’arrêter, est déterminée par des capteurs laser à temps de vol de la série optoNCDT ILR1030-8/LC1 de Micro-Epsilon. Ces capteurs de distance sont particulièrement adaptés à ces applications et à des applications comparables, en raison de leur temps de réponse court. Le capteur est situé du même côté de la chaîne de montage que le robot d’assemblage pour l’installation dans le cockpit. Les mesures sont prises à 100 Hz à la hauteur des montants A et B du véhicule et à une distance d’environ 600 à 700 mm.