












































































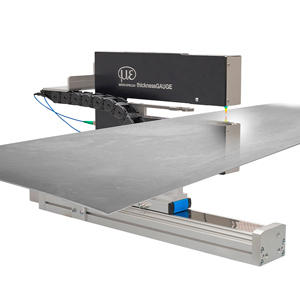
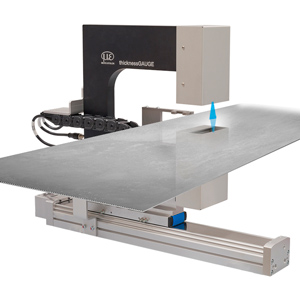












3DInspect : Logiciel performant pour tous les capteurs 3D de Micro-Epsilon
3DInspect est un outil logiciel uniforme et convivial pour tous les capteurs 3D de Micro-Epsilon. Le paramétrage des capteurs 3D et l'enregistrement des données de mesure se font directement à partir du logiciel 3DInspect. Des outils puissants permettent d'aligner et de filtrer le nuage de points, de reconnaître et de sélectionner intuitivement les zones pertinentes et de combiner les programmes. Les nuages de points 3D peuvent être traités à volonté et les valeurs de mesure déterminées peuvent être transmises à la commande.
Caractéristiques
- Un seul logiciel pour tous les capteurs 3D de Micro-Epsilon
- Grande compatibilité
- Grande flexibilité pour l'évaluation en ligne et hors ligne
- Utilisation simple via une interface utilisateur intuitive
- Véritable évaluation 3D, pas seulement 2.5D
- Extraction d'objets en 3D
- Feedback direct lors des algorithmes
- Sortie directement vers la commande (UDP, TCP, Modbus, Ethernet/IP, Profinet)
Valid3D pour de véritables nuages de points 3D sans perte de données
1) Objet mesuré 2) Nuage de points 3) Données 3D réelles même après rotation du nuage de points
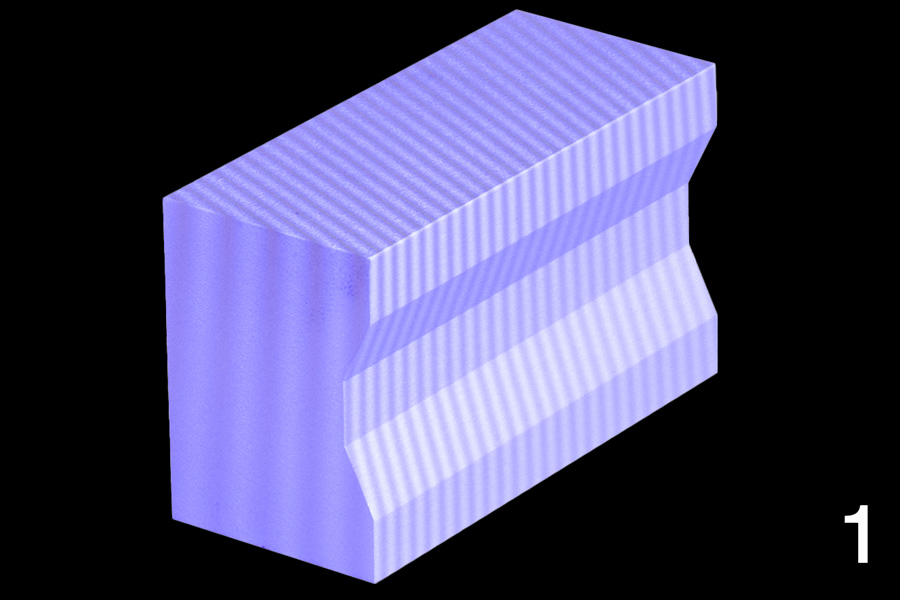
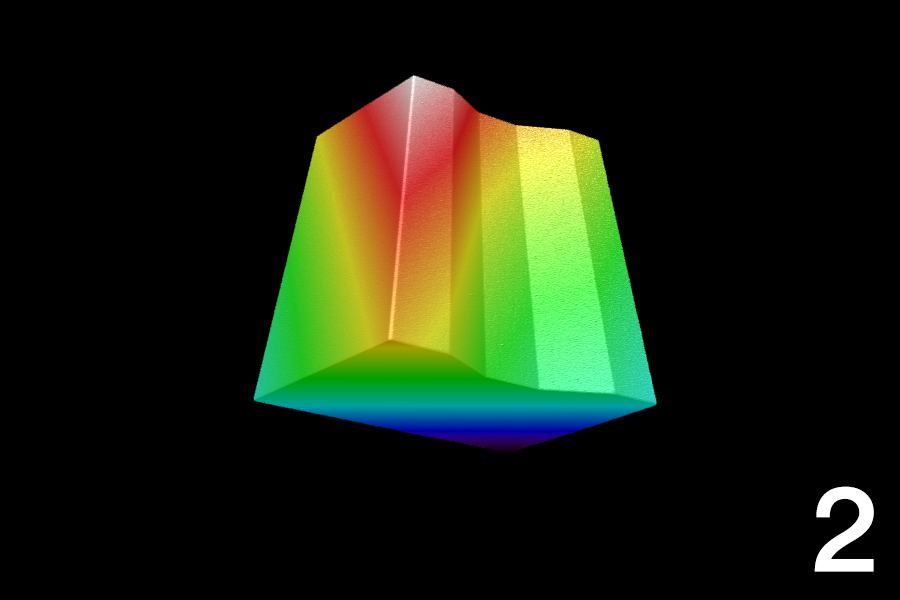
La technologie unique Valid3D permet l’affichage et le traitement sans perte des nuages de points. Ainsi, les objets 3D numérisés peuvent être déplacés arbitrairement dans le système de coordonnées.
Avantages :
- Représentation réelle en 3D de l'objet de test sans perte de données
- Analyse et évaluation de l'objet de test intégral
- Données 3D réelles au lieu d'une évaluation 2.5D
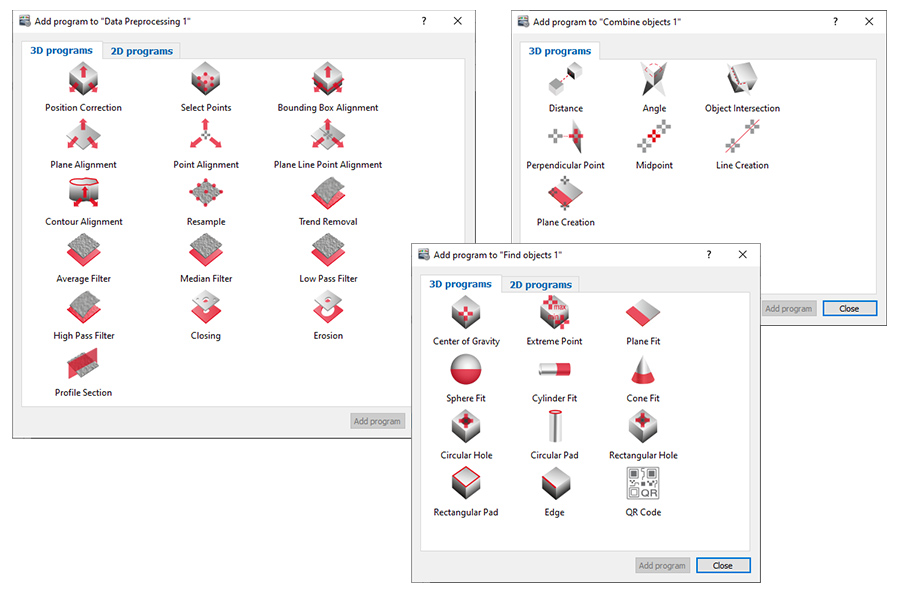
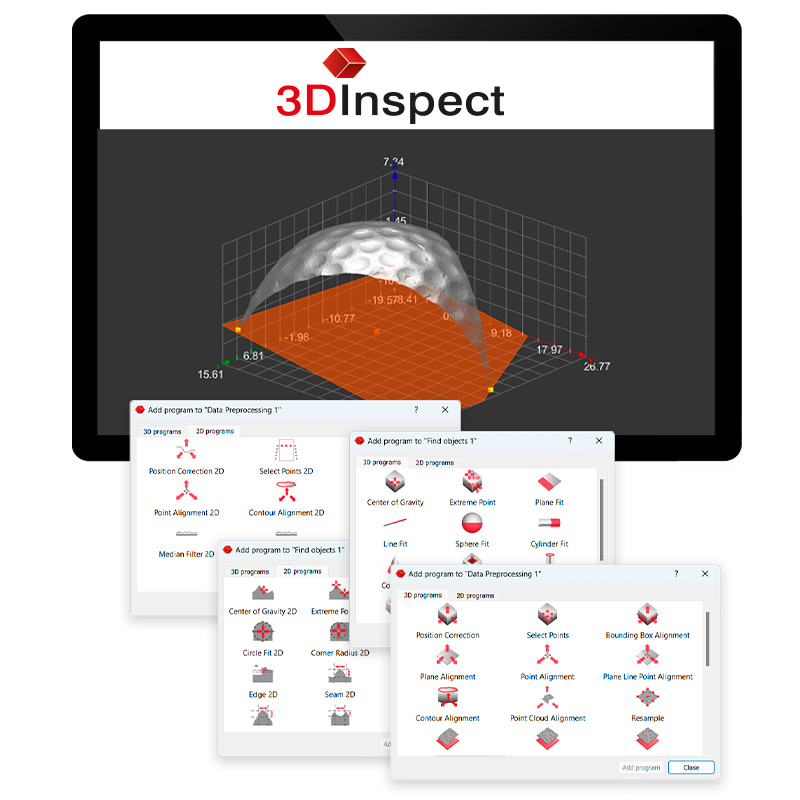
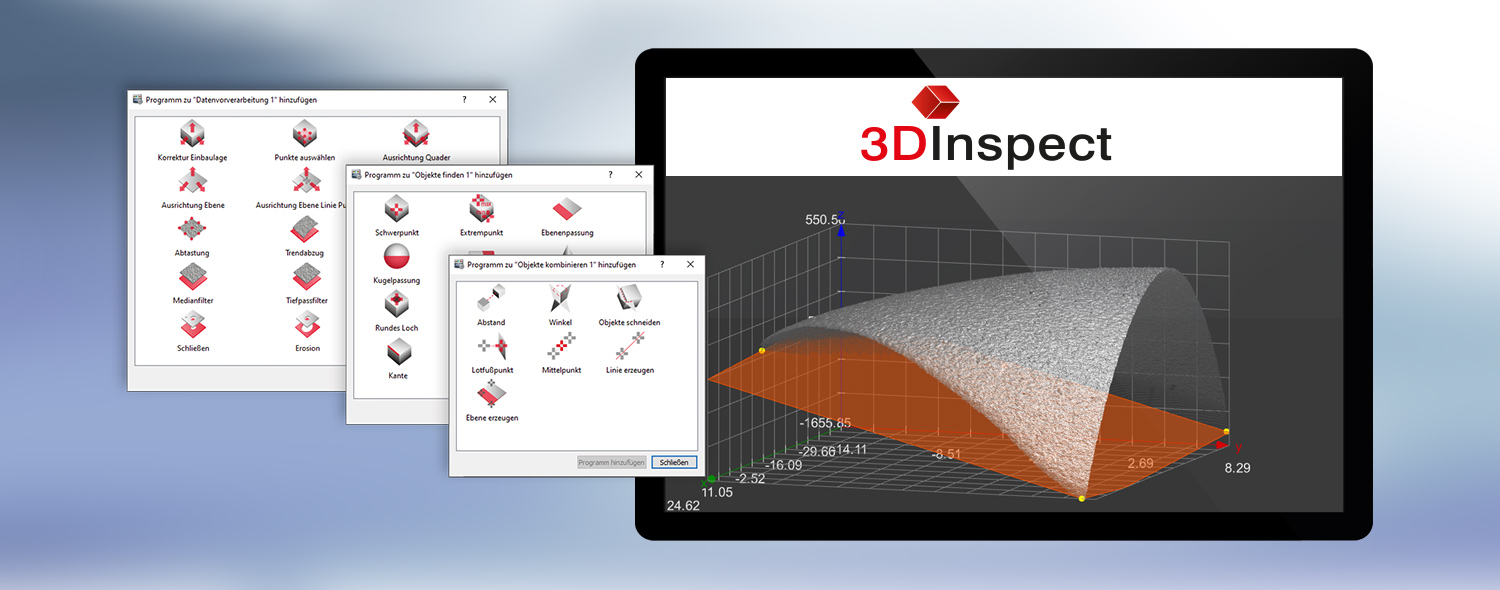
Des programmes puissants pour l'évaluation 3D
3DInspect transmet les données de mesure du capteur à un PC via Ethernet et l’affichage sous forme 3D. Pour le traitement ultérieur, l'analyse et l'évaluation, le logiciel dispose de programmes de mesure performants. Ces programmes de mesure préconfigurés sont répartis dans les catégories «Data preprocessing», «Find objects» ainsi que «Combine objects» et permettent de multiples possibilités de réglage, par ex. :
- Alignement simple du nuage de points
- Filtrage de l'ensemble du nuage de points pour le lissage et l'optimisation
- Sélection simple de la région d'intérêt, par ex. edge, center, maximum point, pad
- Programmes de calcul pour les distances, hauteurs, angles, rayons
- Sortie de signal OK/nOK